数百万円~数十万円で高機能なロボットが購入できるようになり、中小規模の製造の現場でもロボットが身近になりました。
そんなロボットを活用できるようにするためにロボットをについて調べた結果をまとめるノートです。
作成日:2022-04-05
更新日:2022-04-05
マニュピレータ(ロボット本体)の構造による分類
マニュピレータ(ロボット本体)は、求められる作業に最適な構造があります。マニュピレータ(ロボット本体)の目的は、エンドエフェクタを特定の位置・角度にすることです。作業のために必要なエンドエフェクタの位置・角度にするために効率的な構造を選択することが必要です。
- 多関節ロボット 「手先」(左図のオレンジの部品)の位置を決めるために複数の関節で構成されている構造のロボットを多関節ロボットという。関節の種類と配置によって以下のように分類される。
- 直角座標ロボット
- 円筒座標ロボット
- 水平多関節ロボット
- 垂直多関節ロボット
- 極座標ロボット
- パラレルリンクロボット
- 双腕型ロボット
- 協働ロボット
直線的に移動する関節(直動関節)を3つ組み合わせて「手先」(左図のオレンジの部品)の位置を決める構造のロボット。3Dプリンタなどでよく見る構造。直交ロボット、単軸ロボットとも呼ばれる。
左図の赤い部品は手前⇔奥の水平に動き、緑色の部品は垂直に動き、青い部品は左右の水平に動くことでオレンジ色の部品の位置を決める。
1つの水平方向に回転する関節(回転関節)と2つの直線的に移動する関節(直動関節)を組み合わせて「手先」(左図のオレンジの部品)の位置を決める構造のロボット。
左図の赤い部品は水平に回転し、緑色の部品は垂直に動き、青い部品は左右の水平に動くことでオレンジ色の部品の位置を決める。
「手先」(左図のオレンジの部品)の位置を決めるための主な関節が水平方向に回転する関節(回転関節)で構成されている構造のロボット。スカラロボットとも呼ばれる。
左図の赤い部品は水平に動き、緑色の部品も水平に動き、青い部品は上下に動くことでオレンジ色の部品の位置を決める。
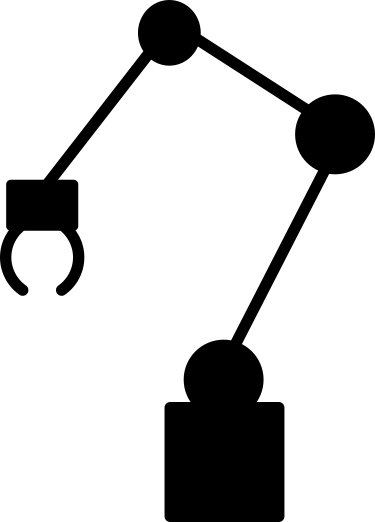
「手先」(左図のオレンジの部品)の位置を決めるための主な関節が垂直方向に回転する関節(回転関節)で構成されている構造のロボット。
左図の赤い部品は水平方向に回転し、緑色の部品は垂直方向に回転し、青い部品も垂直方向に回転し、紫の部品も垂直方向に回転することでオレンジ色の部品の位置を決める。
2つの水平方向に回転する関節(回転関節)と1つの直線的に移動する関節(直動関節)を組み合わせて「手先」(左図のオレンジの部品)の位置を決める構造のロボット。
左図の赤い部品は水平方向に回転し、緑色の部品は垂直方向に回転し、青い部品は左右の水平に動くことでオレンジ色の部品の位置を決める。
複数の関節が1つの「手先」に接続されたパラレルリンク機構の構造のロボット。つながっている関節を一つずつ動かしていく他の多関節ロボットの構造を「シリアルメカニズム」と呼び、関節を並列に動かすパラレルリンクロボの構造を「パラレルメカニズム」と呼ぶ。
全ての関節を並列に動作させることで「手先」(左図のオレンジの部品)の位置を決める。
多関節ロボットを2台使用して、人間の日本の腕のように振舞うことで、人間の動作と同じ作業をすることができるロボット。人間が作業している環境を変えることなく設置することができる。
多関節ロボットにセンサーを搭載して人が接触しても怪我の無いように減速したり、人が近づいたときに停止するなどロボットによるケガを防止する機能を持っているロボット。従来の産業用ロボットとことなり安全柵を設置することなく稼働させることが可能である。
著:
h_suehiro

© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。