数百万円~数十万円で高機能なロボットが購入できるようになり、中小規模の製造の現場でもロボットが身近になりました。
そんなロボットを活用できるようにするためにロボットをについて調べた結果をまとめるノートです。
作成日:2022-04-26
更新日:2022-04-27
サービスロボットのシステム構成
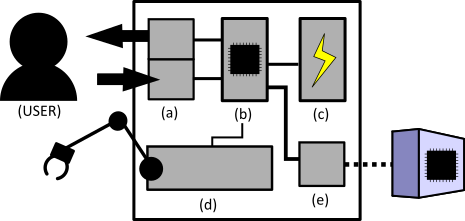
サービスロボットは、大きく分けると(a)コミュニケーション用モジュール、(b)制御モジュール、(c)電源モジュール、(d)アクションモジュール、(e)外部通信モジュールの5つの構成に分けることができます。
サービスロボットは用途が大きく異なるので、各モジュールの内容は大きく異なります。
- コミュニケーション用モジュール
- 入力
- スイッチ
- タッチパネル
- センサー(タッチ、傾き、距離など)
- カメラ(2D、3D)
- マイク(音声分析) など
- 出力
- ランプ
- 液晶画面
- 音(ブザー、スピーカー)
- 音声(音源、AI音声) など
- 制御モジュール
- 各モジュールの制御用基板
- CPU基板 など
- 電源モジュール
- バッテリー
- 電圧変換
- 充電器 など
- アクションモジュール
- マニュピレータ(ロボットアームなど)
- 移動用(タイヤ、キャタピラなど)
- その他
- 外部通信モジュール
- ネットワーク(有線、無線)
- シリアル通信(有線) など
ユーザとコミュニケーションを行うためのモジュール。ユーザからロボットへの入力とロボットからユーザーへの出力に分けることができます。
各モジュールの制御用基板やすべてのモジュールを制御するためのCPUを搭載した基板などのモジュール。
独立して動くために電源を内蔵しているものが多い。各モジュールに適した電圧に変換するモジュールや充電機能を内蔵するものもあります。
何かしらの動作をするモジュール。マニュピレータなどの複雑なものもあれば、移動用、その他さまざまなモジュールがあります。
複雑なデータ処理を外部のコンピュータやクラウドで行う場合に外部との通信を必要なモジュール。
著:
h_suehiro

© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。