数百万円~数十万円で高機能なロボットが購入できるようになり、中小規模の製造の現場でもロボットが身近になりました。
そんなロボットを活用できるようにするためにロボットをについて調べた結果をまとめるノートです。
作成日:2022-03-31
更新日:2022-04-05
産業用ロボットのシステム構成
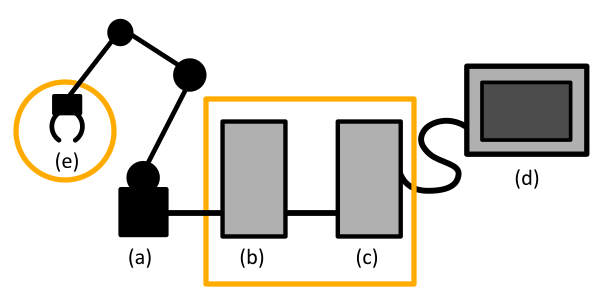
産業用ロボットは基本的に(a)マニュピレータ、(b)マニュピレータ制御装置、(c)コントローラー、(d)ティーチペンダント、(e)エンドエフェクタの5つで構成されている。
マニュピレータ制御装置とコントローラーは1つの筐体に収まっていることが多い。また、ロボットが行う作業によってエンドエフェクタは異なる。
- マニュピレータ(ロボット本体)
- マニュピレータ制御装置
- コントローラー
- ティーチペンダント
- エンドエフェクタ
3つ以上のアクチュエータ(関節)を使用してエンドエフェクタを特定の位置、角度にするための装置。エンドエフェクタがつかんだモノを移動・回転させることもある。
マニュピレータのアクチュエータ(関節)を制御する装置。
マニュピレータ制御装置をコントロールする装置。マニュピレータ制御装置から情報を取得することもできる。
センサーやカメラを接続して、入力した情報と制御を連携することもある。また、他の設備の制御をすることで連携を実現することもある。
マニュピレータ制御装置とコントローラーは1つの筐体に収まっていることが多い。
コントローラーへ設定やプログラムを行う装置。マニュピレータの状態を表示することもできる。
ロボットが行う作業によってエンドエフェクタは異なる。モノを掴むロボットハンドや工具(ドライバーやグラインダ、溶接装置など)などがある。
著:
h_suehiro

© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。