
「ハトロボ」は、ロボットを研究することを目的に開発している鳩型ロボットです。3つのアクチュエータを中心に構成されています。
アクチュエータとしてステッピングモーターを使用していますが、トルクを上げるために「減速機」を実装しています。
作成日:2022-05-05
更新日:2022-06-12
制作日誌
開発の経緯
このロボット開発のきっかけは、自作ゲームのキャラクタを3Dプリンタで出力したことでした。
はじめの一歩
鳩の外観は、別途作成していたゲームのキャラクタ流用。そのキャラクタは3Dデータで作成していたので、3Dプリンタで出力してみようとプラモデルを作りました。
そのプラモデルを組み立てると首が可動するようにできていたので、それを動力で動かしてみたくなりました。
-
ステッピングモータの調査
-
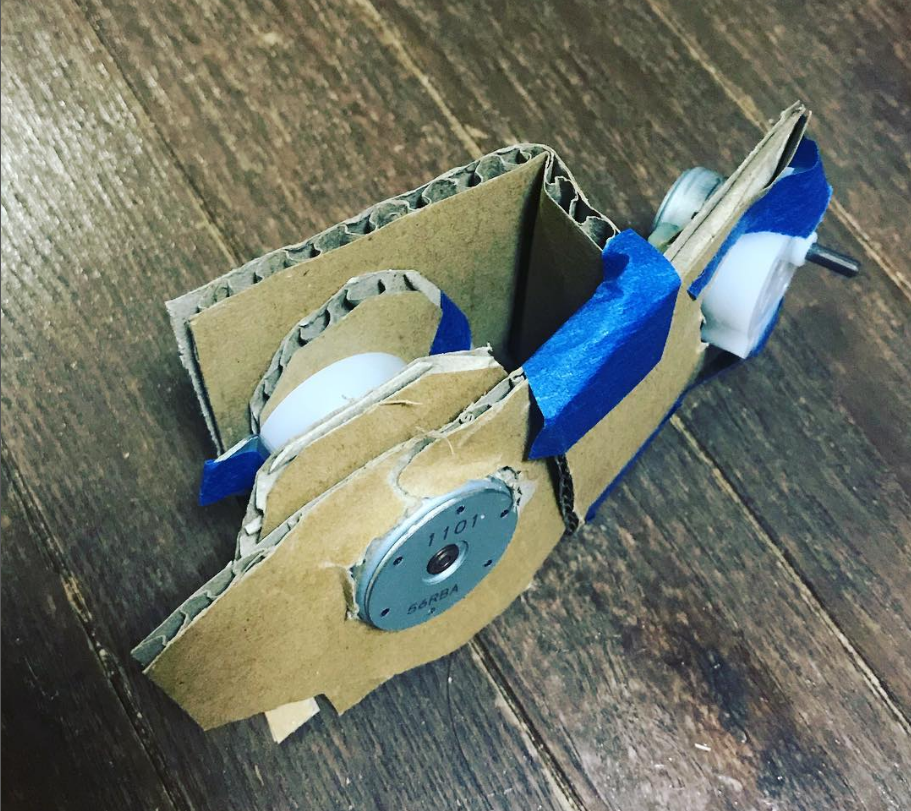
試作模型①段ボール
-

試作模型②スチレンボード
-
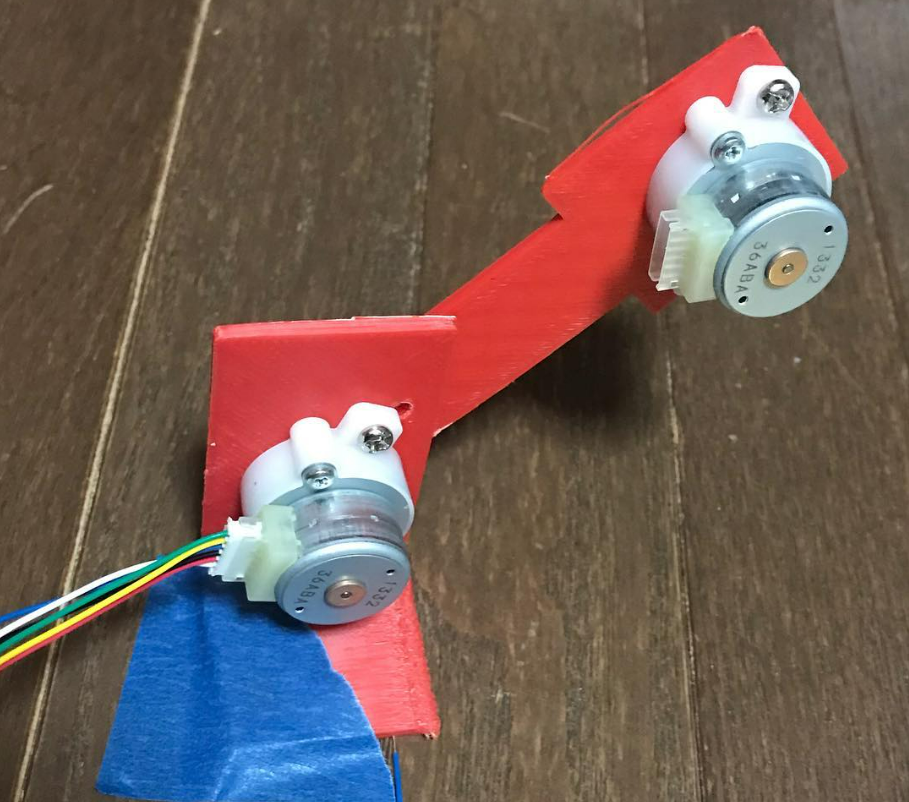
試作模型③プロトタイプ
著:
h_suehiro

© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。