
「ハトロボ」は、ロボットを研究することを目的に開発している鳩型ロボットです。3つのアクチュエータを中心に構成されています。
アクチュエータとしてステッピングモーターを使用していますが、トルクを上げるために「減速機」を実装しています。
作成日:2022-06-08
更新日:2022-06-08
ハトロボ(1号機)
鳩型ロボットの1号機です。
沿革
試作機を制作して明確になった課題をクリアするための機体。明確になった課題は速度の遅さ。その原因は自作の減速機。筐体をうごかすトルクを得ることはできたけど、速度が遅すぎる。
ということで、期待の速度を実現するために試行錯誤しながら制作中です。

工夫
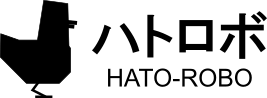
既製品の減速機を採用
作成した減速機で筐体をうごかすことができたけれど速度がたりない。ということで、タミヤのテクニクラフトシリーズを検討し採用。

困難
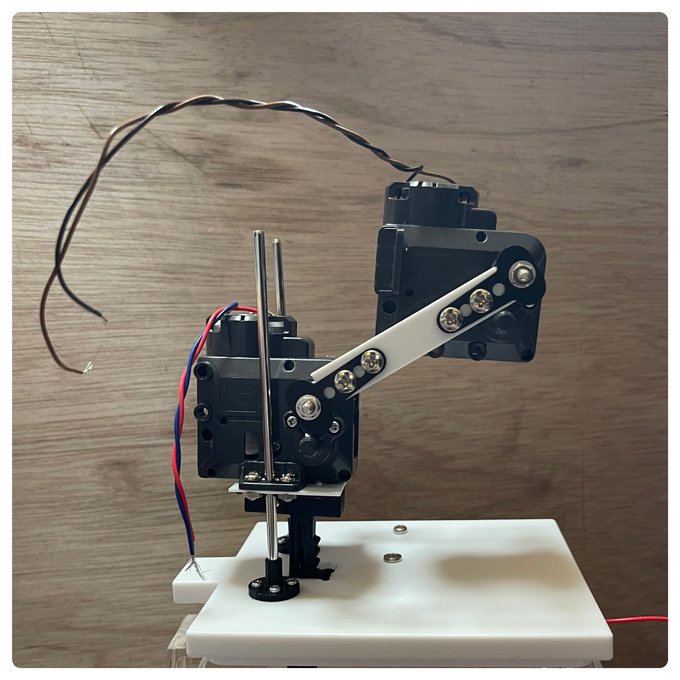
DCモータの制御
困難:DCモータのノイズ
既製品の減速機を使用することで動力が変わりました。自作の減速機の動力はステッピングモータで、既製品の減速機はDCモータになります。
モータードライバはどちらにも対応していたので変更なしですが、DCモータのノイズでマイコンがハングするようになりました。
解決策:コンデンサを使用したノイズ対策
コンデンサをモータに設置することでノイズ対策を実施することで、マイコンがハングすることはなくなりました。
幸運
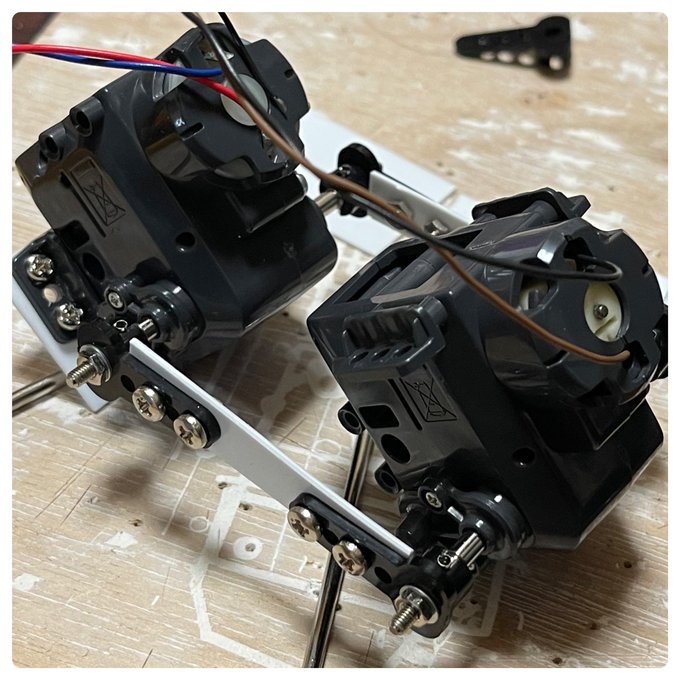
小型化
減速機を自作から既製品に変えたことで、減速機自体がコンパクトになりました。そのおかげで筐体の大きさも全体的にコンパクトにでき小型化できました。
著:
h_suehiro

© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。
コンデンサをモータに設置することでノイズ対策を実施することで、マイコンがハングすることはなくなりました。
幸運
小型化
減速機を自作から既製品に変えたことで、減速機自体がコンパクトになりました。そのおかげで筐体の大きさも全体的にコンパクトにでき小型化できました。
著:
h_suehiro
© 2011-2022 cinfo.com
当サイトの内容、テキスト、画像などは転載禁止です。